四连杆机构计算软件
V1.0官方免费版大小:3.6M更新:2016-05-23
类别:行业软件系统:WinAll
分类
大小:3.6M更新:2016-05-23
类别:行业软件系统:WinAll

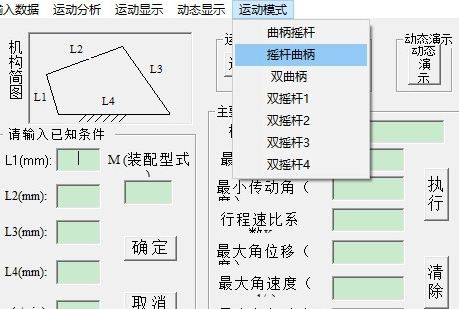
四连杆机构计算软件是一款连杆机构设计小软件,实现给定任意四连杆机构和H点的相对位置,可以模拟出H点的运行坐标。选择了以连杆和摇杆作为设计变量,传动角条件作为约束条件,输出角平方和最小为目标函数,使用多维约束优化函数fmincon对连杆和摇杆的长度进行优化。然后采用修正牛顿切线法和运动误差分析程序对优化后的四连杆机构进行运动误差的分析。
连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,从而可用于实现已知运动规律和已知轨迹。此外,低副面接触的结构使连杆机构具有以下一些优点:运动副单位面积所受压力较小,且面接触便于润滑,故磨损减小;制造方便,易获得较高的精度;两构件之间的接触是靠本身的几何封闭来维系的,它不象凸轮机构有时需利用弹簧等力封闭来保持接触。因此,平面连杆机构广泛应用于各种机械、仪表和机电产品中。平面连杆机构的缺点是:一般情况下,只能近似实现给定的运动规律或运动轨迹,且设计较为复杂;当给定的运动要求较多或较复杂时,需要的构件数和运动副数往往较多,这样就使机构结构复杂,工作效率降低,不仅发生自锁的可能性增加,而且机构运动规律对制造、安装误差的敏感性增加;机构中作复杂运动和作往复运动的构件所产生的惯性力难以平衡,在高速时将引起较大的振动和动载荷,故连杆机构常用于速度较低的场合。
近年来,随着连杆机构设计方法的发展,电子计算机的普及应用以及有关设计软件的开发,连杆机构的设计速度和设计精度有了较大的提高,而且在满足运动学要求的同时,还可考虑到动力学特性。尤其是微电子技术及自动控制技术的引入,多自由度连杆机构的采用,使连杆机构的结构和设计大为简化,使用范围更为广泛。
曲柄摇杆机构按照原动件和从动件的对应关系可知其有5个独立参数,对于图1分别为曲柄长度L1,连杆长度L2,摇杆长度L3,机架长度L4,曲柄初始角φ0和摇杆的初始角Ψ0,由于L1和L4已知,
且由图1的几何关系知:
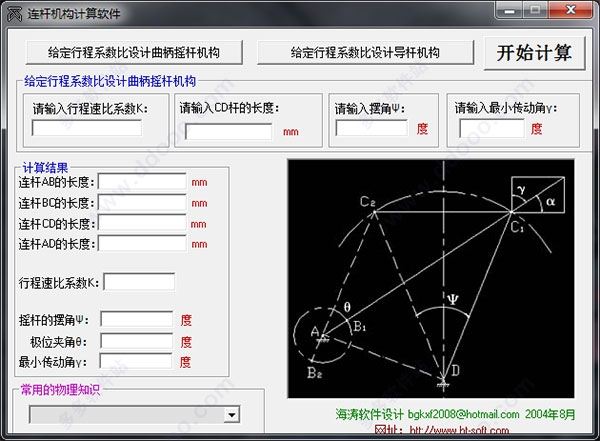
所以φ0和Ψ0已不再是独立参数,而是杆长的函数。经上分析独立变量只有L2和L3。因此,选择连杆长度L2和摇杆长度L3作为设计变量。
即:X = [L2 L3]T= [X1X2]T
 今晨送货单打印软件查看
今晨送货单打印软件查看 SuperRecovery(超级硬盘数据恢复)查看
SuperRecovery(超级硬盘数据恢复)查看 ProjectCenter项目管理查看
ProjectCenter项目管理查看 快手活动助力源码查看
快手活动助力源码查看 pcb设计软件Altium Nexus查看
pcb设计软件Altium Nexus查看 BodyPlus心智护PC版查看
BodyPlus心智护PC版查看 Cadence Allegro查看
Cadence Allegro查看 智百威威云POS查看
智百威威云POS查看 资产跟踪管理软件(Liberty Street AssetManage Enterprise) 2018查看
资产跟踪管理软件(Liberty Street AssetManage Enterprise) 2018查看 周易姓名打分法电脑算命生辰八字起名查看
周易姓名打分法电脑算命生辰八字起名查看 三驱电镀业管理系统查看
三驱电镀业管理系统查看 智汇推广告营销平台查看
智汇推广告营销平台查看 海康威视红绿灯配置器查看
海康威视红绿灯配置器查看 苏州一光RTS112R系列升级软件查看
苏州一光RTS112R系列升级软件查看 My Family Tree32位/64位安装包查看
My Family Tree32位/64位安装包查看 饿了么无限首单教程查看
饿了么无限首单教程查看 苏一光330系列全站仪升级软件查看
苏一光330系列全站仪升级软件查看 买房房间号码吉凶查询查看
买房房间号码吉凶查询查看 农历 阴历生日算命生辰八字测算查看
农历 阴历生日算命生辰八字测算查看 冲模设计软件3DQuickPress查看
冲模设计软件3DQuickPress查看 角变位齿轮计算工具查看
角变位齿轮计算工具查看 优码服装进销存软件查看
优码服装进销存软件查看 超易电器售后服务管理软件查看
超易电器售后服务管理软件查看 锦鲤e企业网上银行查看
锦鲤e企业网上银行查看GAOne控制测量数据解算系统行业软件MV2.0.2.1免费版
查看标桥清标工具行业软件Mv3.0.1.1 官方版
查看固态硬盘测试4k对齐软件最新中文版行业软件.27Mv2.0.7316 汉化版
查看仁润供应链解决方案行业软件M1.94.0.0最新版
查看中星会员管理系统行业软件Mv8.3
查看管家婆旗舰进销存+电商管理系统行业软件Mv5.2.6官方免费版
查看工程常用资料小工具行业软件M超实用大全
查看色彩风暴绘图软件行业软件Mv17.0.0官方精简版
查看实惠猪QQ群淘客软件行业软件M官方最新版
查看ICM Capital英国艾森官方MT4外汇交易软件行业软件M电脑版
查看江城齿轮计算系统行业软件.03MV1.0绿色版
查看Samsung三星C46xFW系列固件更新实用程序行业软件MV3.00.02.21官方版
查看福建省自然人电子税务局扣缴端行业软件Mv3.1.084官方版
查看天微拼多多砍价神器(拼多多砍价软件)行业软件.01Mv1.0 PC版
查看化学反应方程式编辑器软件(ChemDraw Pro)行业软件Mv14.0.0.117 官方最新版
查看2016年度部门决算报表软件行业软件MV1.0官方版
查看Eagle Eye Converter For PS3鼠标键盘转接器行业软件MV3.0中文版
查看迷你工装造价软件行业软件Mv2018R3 官方版
查看讯码付PC版行业软件M1.0.0.0官方版
查看陕西地税企业所得税汇算清缴系统安装包行业软件MV1.0.130官方版
查看红绸盾智能导航系统官方版行业软件Mv1.108免费版
查看魔术手淘宝复制专家行业软件Mv2.27 绿色免费版
查看武汉市地税自主办税系统行业软件Mv5.3.3.1 官方最新版
查看K3Cloud数据字典(KЗCloud Data Dictionary)行业软件M1.0绿色版
查看点击查看更多